Главные методы управления скоростью вращения двигателя постоянного тока
Электродвигатель со схемой постоянного тока может выступать как объект управления, который регулируется по цепям статора и возбуждения.В науке существует несколько средств, с помощью которых можно регулировать обороты моторчика со схемой постоянного тока. Это:
- Смена тока в цепи возбудительной обмотки при стабильном напряжении на статорном обматывании;
- Перемена электронапряжения на обматывании якоря при нормальном движении направленных частиц в цепи возбудительного обматывания;
- Изменение тяги на якорной обмотке, а также смена тока в цепи возбудительного обматывания.
Чтобы изменить показатели напряжения или ампер-витков в цепи возбудительной обмотки больше всего используют выпрямители. В промышленности такие приборы обычно бывают одно- и трехфазные, работающие по мостовой схеме.
За счет особенности конструкций моторов постоянного тока нужная мощность выпрямителей для возбудительной обмотки намного меньше тяги выпрямителя для статорного обматывания. Но есть и недочеты регулирования частоты вращения движка при помощи изменения силы тока в цепи возбудительного обматывания.
Плохая динамика автоматического электропривода – это главный недостаток. Но некоторые мастера не считают это критичной проблемой. При создании проектов нужно обращать внимание на требования к приводам и руководствоваться техническим заданием.
Во втором методе происходит регулирование угловой скорости двигателя постоянного тока со схемой независимого возбуждения. Это делается изменением показателей магнитного поля при помощи внесения дополнительного реостата в цепь возбудительной обмотки.
При нагрузке и ослаблении потока угловые обороты мотора падают, а при холостом ходе возрастают. Смена скорости может быть только для повышения насыщения мотора.
В третьем методе угловая скорость агрегата со схемой постоянного тока изменяется прямо пропорционально напряжению, которое подводится к статору без влияния нагрузки.
Так как мотор отличается жесткими регулировочными характеристиками, а жесткость не меняется, то функционирование стабильно на всех угловых скоростях, что помогает обеспечить широкие пределы скоростного режима без влияния тяги. Данный диапазон достигает значения 10 и вполне может расшириться при помощи особых методов контроля.

Если энергетический источник дает возможность беспрерывного изменения подводимого напряжения к движку, то регулировка скорости будет плавным.
Этот метод считается экономичным. Такое обстоятельство обусловлен отсутствием дополнительных потерь тяги в цепи статора.
Регулировка частоты вращения электромоторов 220В, 12В и 24В
Чтобы обеспечить плавность повышения и снижения скорости оборотов вала специалисты придумали специальный прибор, названный регулятором оборотов электродвижка 220В. Этот аппарат, предназначенный для регулирования оборотов движков 12 вольт, 220 и 240 вольт, отличается стабильной эксплуатацией, отсутствие перебоев напряжений и длительностью службы.
Вращение имеет несколько способов, на которые влияют модели электродвигателя:
- Простой. Заключается в процедуре изменения напряжения питания. Это происходит только на машинах с малой мощностью. Но это и не самый экономичный вариант, так как характеризуется большими потерями и падением показателей КПД;
- В цепи якоря. Его считают лучшим методом регулирования оборотов движка с независимой схемой возбуждения. Угол наклона не меняет своих механических параметров, а двигаются друг к другу;
- От сети. Однофазные движки переменного тока также позволяют регулировать скорость обращения индуктора. Это коллекторные движки, асинхронники и двухфазные моторчики.
Для того, чтобы правильно подобрать регулятор нужно учитывать параметры аппарата или специфику назначения. Учитывают и следующие особенности:
- Коллекторные электродвижки используют векторные контроллеры, хотя скалярные зарекомендовали себя вполне надежными;
- Мощность – главное обстоятельство, на которое стоит обратить внимание. Она должна быть подходящей и не превышать показатели для безопасности;
- Регулятор – это аппарат для преобразования частоты, поэтому необходимо выбирать по техническим параметрам.
Кроме того, стоит обратить свой взор на эксплуатационный срок, размеры и число разъемов.
Регулирование частоты вращения ДПТ НВ изменение напряжения в цепи якоря
Регулирование частоты вращения двигателя изменением питающего напряжения применяется лишь при IB = const, т. е. при раздельном питании цепей обмотки якоря и обмотки возбуждения при независимом возбуждении.
Частота вращения в режиме х.х. n0 пропорциональна напряжению, а от напряжения не зависит, поэтому механические характеристики двигателя при изменении напряжения не меняют угла наклона к оси абсцисс, а смещаются по высоте, оставаясь параллельными друг другу (см. рис. 29.4, в). Для осуществления этого способа регулирования необходимо цепь якоря двигателя подключить к источнику питания с регулируемым напряжением. Для управления двигателями малой и средней мощности в качестве такого источника можно применить регулируемый выпрямитель, в котором напряжение постоянного тока меняется регулировочным автотрансформатором (АТ), включенным на входе выпрямителя (рис. 29.6,а).
Для управления двигателями большой мощности целесообразно применять генератор постоянного тока независимого возбуждения; привод осуществляется посредством приводного двигателя (ПД), в качестве которого обычно используют трехфазный двигатель переменного тока. Для питания постоянным током цепей возбуждения генератора Г и двигателя Д используется возбудитель В — генератор постоянного тока, напряжение на выходе которого поддерживается неизменным. Описанная схема управления двигателем постоянного тока (рис. 29.6, б)известна под названием системы «генератор — двигатель» (Г—Д).

Рис. 29.6. Схемы включения двигателей постоянного тока при регулировании частоты вращения изменением напряжения в цепи якоря
Изменение напряжения в цепи якоря позволяет регулировать частоту вращения двигателя вниз от номинальной, так как напряжение свыше номинального недопустимо. При необходимости регулировать частоту вращения вверх от номинальной можно воспользоваться изменением тока возбуждения двигателя.
Изменение направления вращения (реверс) двигателя, работающего по системе Г—Д, осуществляется изменением направления тока в цепи возбуждения генератора Г переключателем П, т. е. переменой полярности напряжения на его зажимах. Если двигатель постоянного тока работает в условиях резко переменной нагрузки, то для смягчения колебаний мощности, потребляемой ПД из трехфазной сети, на вал ПД помещают маховик М, который запасает энергию в период уменьшения нагрузки на двигатель Д и отдает ее в период интенсивной нагрузки двигателя.
Регулирование частоты вращения изменением напряжения в цепи якоря обеспечивает плавное экономичное регулирование в широком диапазоне nMAX/nMIN ≥ 25 . Наибольшая частота вращения здесь ограничивается условиями коммутации, а наименьшая — условиями охлаждения двигателя.
Еще одним достоинством рассматриваемого способа регулирования является то, что он допускает безреостатный пуск двигателя при пониженном напряжении.
Типы ДПТ
Существующие электродвигатели постоянного тока можно классифицировать по двум основным признакам: по наличию или отсутствию в конструкции мотора щеточно-коллекторного узла и по типу магнитной системы статора.
Рассмотрим основные отличия.
По наличию щеточно-коллекторного узла
Двигатели постоянного тока для коммутации обмоток, которых используются щёточно-коллекторные узлы, называются коллекторными. Они охватывают большой спектр линейки моделей электромоторов. Существуют двигатели, в конструкции которых применяется до 8 щёточно-коллекторных узлов.
Функции ротора может выполнять постоянный магнит, а ток от электрической сети подаётся непосредственно на обмотки статора. В таком варианте отпадает надобность в коллекторе, а проблемы, связанные с коммутацией, решаются с помощью электроники.
В таких бесколлекторных двигателях устранён один из недостатков –искрение, приводящее к интенсивному износу пластин коллектора и щёток. Кроме того, они проще в обслуживании и сохраняют все полезные характеристики ДПТ: простота в управлении связанном с регулировкой оборотов, высокие показатели КПД и другие. Бесколлекторные моторы носят название вентильных электродвигателей.
По виду конструкции магнитной системы статора
В конструкциях синхронных двигателей существуют модели с постоянными магнитами и ДПТ с обмотками возбуждения. Электродвигатели серий, в которых применяются статоры с потоком возбуждения от обмоток, довольно распространены. Они обеспечивают стабильную скорость вращения валов, высокую номинальную механическую мощность.
О способах подключения статорных обмоток шла речь выше. Ещё раз подчеркнём, что от выбора схемы подключения зависят электрические и тяговые характеристики двигателей постоянного тока. Они разные в последовательных обмотках и в катушках с параллельным возбуждением.
Области применения
Перечислять все области применения электродвигателей можно бесконечно долго. Для примера назовём лишь несколько из них:
- бытовые и промышленные электроинструменты;
- автомобилестроение – стеклоподъёмники, вентиляторы и другая автоматика;
- трамваи, троллейбусы, электрокары, подъёмные краны и другие механизмы, для которых важны высокие параметры тяговых характеристик.
Принцип работы
Ещё со школьной скамьи мы помним, что на провод под напряжением, расположенный между полюсами магнита, действует выталкивающая сила. Происходит это потому, что вокруг проволоки образуется магнитное поле по всей его длине. В результате взаимодействия магнитных полей возникает результирующая «Амперова» сила:
F=B×I×L, где B означает величину магнитной индукции поля, I – сила тока, L – длина провода.
Вектор «Амперовой» всегда перпендикулярен до линий магнитных потоков между полюсами. Схематически принцип работы изображён на рис. 6.
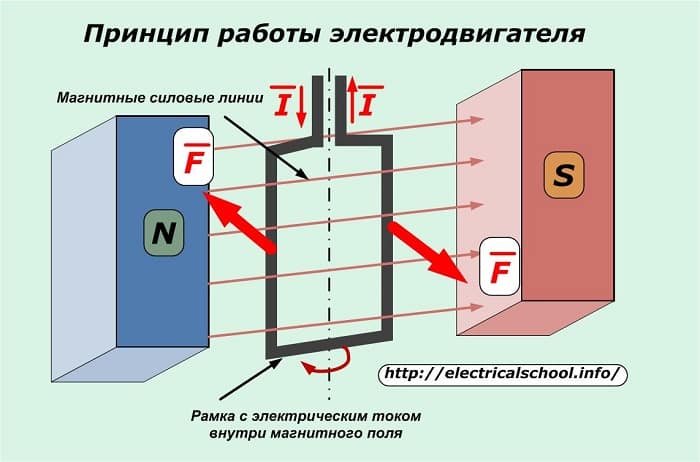
Рис. 6. Принцип работы ДПТ
Если вместо прямого проводника возьмём контурную рамку и подсоединим её к источнику тока, то она повернётся на 180º и остановится в в таком положении, в котором результирующая сила окажется равной 0. Попробуем подтолкнуть рамку. Она возвращается в исходное положение.
Поменяем полярность тока и повторим попытку: рамка сделала ещё пол-оборота. Логично припустить, что необходимо менять направление тока каждый раз, когда соответствующие витки обмоток проходят точки смены полюсов магнитов. Именно для этой цели и создан коллектор.
Схематически можно представить себе каждую якорную обмотку в виде отдельной контурной рамки. Если обмоток несколько, то в каждый момент времени одна из них подходит к магниту статора и оказывается под действием выталкивающей силы. Таким образом, поддерживается непрерывное вращение якоря.
Регулирование оборотов электродвижков с параллельным возбуждением
В этой возбудительной схеме частота обращений движков меряется сменой сопротивления в статорной цепи, изменением потока магнитных частиц и сменой напряжения, проводимого к двигателю.
Первый способ неэкономичен, потому и применяется редко. Регулирование частоты вращения происходит под нагрузкой и тогда приходится использовать разный наклон механических параметров. Крутящий момент в таком случае не меняется.
Популярным стал метод изменением магнитного поля. Показатели измеряют реостатом а повышение сопротивления приводит к снижению силы возбудительного тока, и тогда становятся больше магнитный поток и обороты.
В третьем способе требуется использование особых схем. Движки с постоянным током в сравнении с «асинхронниками» отличаются повышенной массой и дороговизной, но их КПД ниже и использование тяжелее.
Современные методы регулирования
В наше время существует несколько способов регулировки оборотов электродвигателя постоянного тока. Они приведены ниже:
- Регуляторно-контакторное или ручное. Обычно применяется для моторов с малой и средней производительностью, используемых при отсутствии автоматического регулирования. Но и бывает, что подходит и для мощных агрегатов. В статорную цепь вносят дополнительные сопротивления, а при повышении оборотов регулируется возбудительный ток;
- Генератор-двигатель или способ автоматического регулирования. Мотор питается от автономного генератора, наделенного независимым возбуждением, приводимого в действие от любого первичного двигателя.
- Управляемый выпрямитель-двигатель. Этот метод дает возможность повысить КПД и снизить массу прибора. Если же надо быстро остановить механизм, то тогда устанавливают инвертор, передающий электроэнергию в сеть переменного тока. Эта схема ненадежна из-за сложности полупроводниковых аппаратов.
- Импульсное регулирование частоты. Его начали применять в последние годы. Регулировать частоту можно при помощи импульсного прерывателя, время от времени подающего импульсы напряжения на двигатель постоянного тока.
Импульсное регулирование получило широкое применение при запитке движков от сети с постоянным током. Кроме того, этот метод управления используют в приборах с автономной схемой, где применяются аккумуляторные батареи электрической энергии.
Чтобы повысить КПД импульсных преобразователей применяется метод ШИМ или широтно-импульсной модуляции. Эта схема заключается подачей мощности к тяге. Регулировка заключается в смене продолжительности сигнала при неизменной частоте следования импульсов.
ШИМ бывает:
- Аналоговой. Сигнал управления создается аналоговым компаратором, когда на вход инвертора устройства передается сигнал в форме треугольника или пилы, а неинветируемый – беспрерывный импульс.
- Цифровая. Такая ШИМ обычно характерна для двоичных цифровых приборов. Исходящие сигналы могут принимать только значения «Включено или выключено». Пилообразный импульс получается за счет N-битного датчика.
У специалистов ШИМ обычно ассоциируется с механикой. Используя двигатель можно прокручивать тяжелый маховик, но если движок включен или отключен, то и сам маховик будет либо крутиться дальше, либо замедляться по причине трения, когда моторчик выключен.

Регулирование частоты вращения ДПТ НВ изменением основного магнитного потока
Этот способ регулирования в двигателе независимого возбуждения реализуется посредством реостата rрег в цепи обмотки возбуждения. Так, при уменьшении сопротивления реостата возрастает магнитный поток обмотки возбуждения, что сопровождается понижением частоты вращения [см. (29.5)]. При увеличении rрегчастота вращения растет. Зависимость частоты вращения от тока возбуждения выражается регулировочной характеристикой двигателя n=f(IВ) при и .
Из выражения (29.5) следует, что с уменьшением магнитного потока Ф частота вращения n увеличивается по гиперболическому закону (рис. 29.5,а). Но одновременно уменьшение Ф ведет к росту тока якоря Ia = M/(Cм*Ф). При потоке ток якоря достигает значения ,т. е. падение напряжения в цепи якоря достигает значения, равного половине напряжения, подведенного к якорю . В этих условиях частота вращения двигателя достигает максимума nmax. При дальнейшем уменьшении потока частота вращения двигателя начинает убывать, так как из-за интенсивного роста тока Ia второе слагаемое выражения (29.9) нарастает быстрее первого.
При небольшом нагрузочном моменте на валу двигателя максимальная частота вращения nmax во много раз превосходит номинальную частоту вращения двигателя nном и является недопустимой по условиям механической прочности двигателя, т. е. может привести к его «разносу». Учитывая это, при выборе реостата rрегнеобходимо следить за тем, чтобы при полностью введенном его сопротивлении частота вращения двигателя не превысила допустимого значения.
Например, для двигателей серии 2П допускается превышение частоты вращения над номинальной не более чем в 2—3 раза. Необходимо также следить за надежностью электрических соединений в цепи обмотки возбуждения двигателя, так как при разрыве этой цепи магнитный поток уменьшается до значения потока остаточного магнетизма Фост, при котором частота вращения может достигнуть опасного значения.
Вид регулировочных характеристик n = f(Ф) зависит от значения нагрузочного момента M2на валу двигателя: с ростом M2 максимальная частота вращения nmax уменьшается (рис. 29.5, б).
Рис. 29.5. Регулировочные характеристики двигателя независимого возбуждения
Недостаток рассмотренного способа регулирования частоты вращения состоит в том, что при изменении магнитного потока Ф меняется угол наклона механической характеристики двигателя.
Рассмотренный способ регулирования частоты вращения прост и экономичен, так как в двигателях независимого возбуждения ток IВ = (0,01 — 0,07)Iа, а поэтому потери в регулировочном реостате невелики.
Однако диапазон регулирования обычно составляет nMAX/nMIN = 2 — 5. Объясняется это тем, что нижний предел частоты вращения обусловлен насыщением машины, ограничивающим значение магнитного потока Ф, а верхний предел частоты опасностью «разноса» двигателя и усилением влияния реакции якоря, искажающее действие которого при ослаблении основною магнитного потока Ф усиливается и ведет к искрению на коллекторе или же к появлению кругового огня.
Преимущества и недостатки
К достоинствам относится:
- Линейная зависимость характеристик электродвигателей постоянного тока (прямые линии) упрощающие управление;
- Легко регулируемая частота вращения;
- хорошие пусковые характеристики;
- компактные размеры.
У асинхронных электродвигателей, являющихся двигателями переменного тока очень трудно достичь таких характеристик.
Недостатки:
- ограниченный ресурс коллектора и щёток;
- дополнительная трата времени на профилактическое обслуживание, связанное с поддержанием коллекторно-щёточных узлов;
- ввиду того, что мы пользуемся сетями с переменным напряжением, возникает необходимость выпрямления тока;
- дороговизна в изготовлении якорей.
По перечисленным параметрам из недостатков в выигрыше оказываются модели асинхронных двигателей. Однако во многих случаях применение электродвигателя постоянного тока является единственно возможным вариантом, не требующим усложнения электрической схемы.